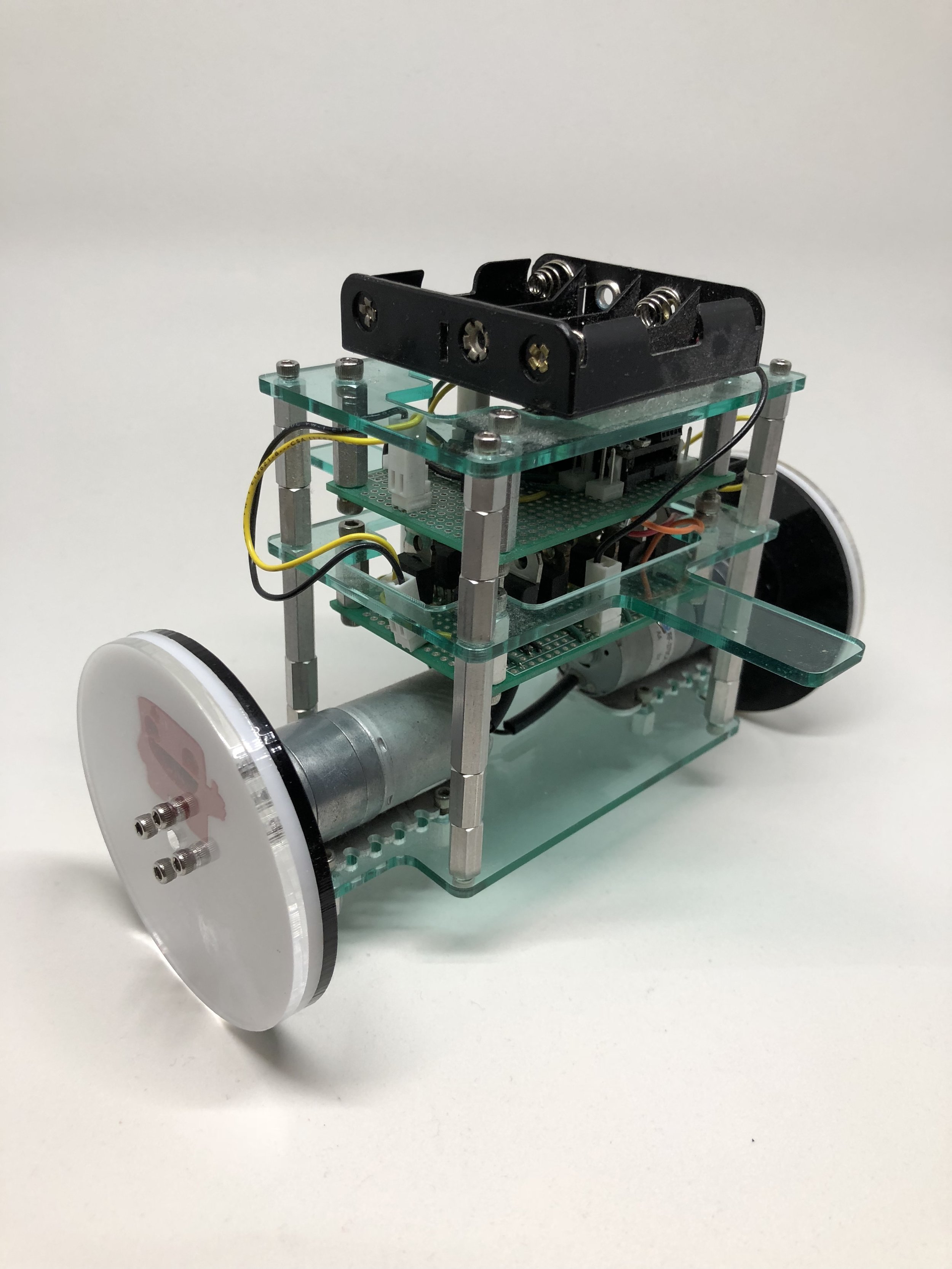

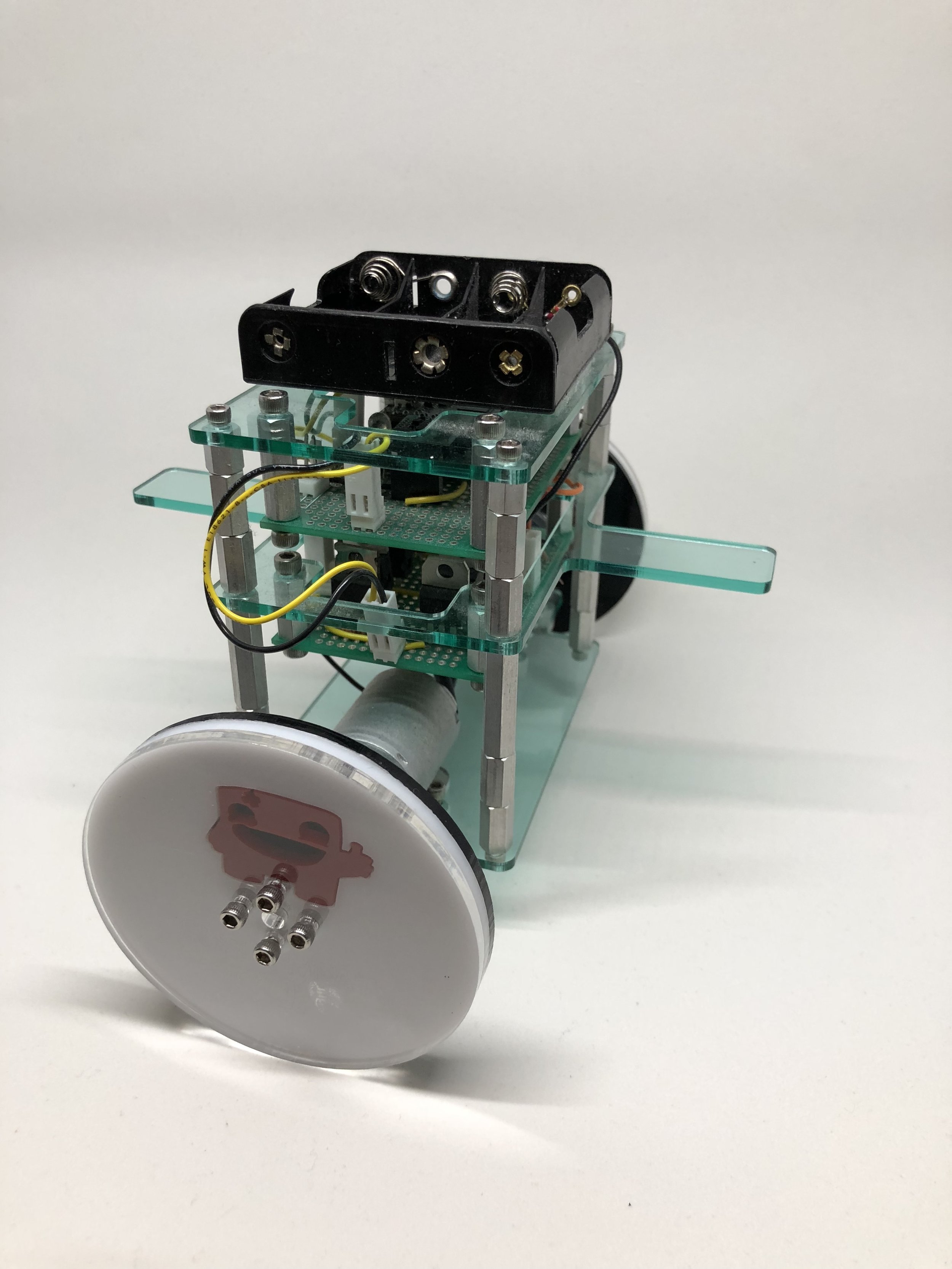
For the penultimate project in Mechatronics, we were split into teams of three and tasked with building a two-wheeled balancing robot. Each team was given an IMU, two motors, and a motor driver and instructed to utilize a PID controller. My team’s robot was designed around a character from a popular platforming game I had recently taken an interest in, Super Meat Boy. Additionally, my team chose to design our own motor driver, composed of MOSFET's, that we eventually replicated for the final project.