Candy was the first major project for IPD 501, an advanced design and manufacturing course. Given aluminum stock, a very basic introduction to CNC milling and SolidCam, and an incredibly limiting two-hour machining time restriction, we were let loose to design and manufacture our best attempts at “desk candy”.
My design consisted of a surface-modeled, organically-shaped koi, meant to take advantage of the capabilities of the CNC mill. After the design of the koi was complete, a large amount of time was devoted to creating the toolpaths and SolidCAMfile. As we were only allowed two hours of milling time, significant efforts were made to cut back on each operation’s duration.
Robockey was the final project in MEAM 510, Graduate-Level Mechatronics. The class was split into teams of three or four and given four weeks to design three robots meant to play hockey by scoring pucks in an enemy goal and defending our own goal. An asymmetric star pattern of infrared lights allowed our robots to determine their position in the playing area. The initial code for positioning the robots was written in MATLAB and eventually translated into C as a library referenced in our main code. Paired with a PID controller, the infrared sensors around our robot allowed us to center our robots on the puck, which was fitted with infrared LED’s.
Focus was the deliverable completed by our team of six to meet the requirements of Machine, the final project in IPD 501, a graduate course in advanced design and manufacturing. The project was intended to showcase different manufacturing techniques students learned in a mechanically interesting assembly. Our team decided to create a Galilean telescope with an effectively damped set of gimbals. We utilized CNC machining and urethane molding for several of our parts; my contribution, however, consisted mainly of: designing an overall master model, creating a sub master model for the telescoping tubes, and machining the large tubes, with the help of another teammate. Ensuring proper tolerances and finishes proved especially difficult for two of the larger tubes, but it was an excellent opportunity to learn new machining techniques on the lathe.
For the second project in a graduate level product design course, students were tasked with creating a watering can. After an introduction to human factors and form development, we were given several weeks to brainstorm potential forms and create our product. After a peer review of my initial sketches, I was dissatisfied with the concepts I had put forth and approached the problem differently. I settled on the design displayed in the images; this form allowed for an easy grip without any noticeable handle as well as ergonomic weight distribution while pouring water. Initially I had planned to slush cast the product in a low melting temperature metal, but ended up 3D printing the watering can. After hours of sanding and painting, I achieved the smooth, shiny surface finish I was hoping for.
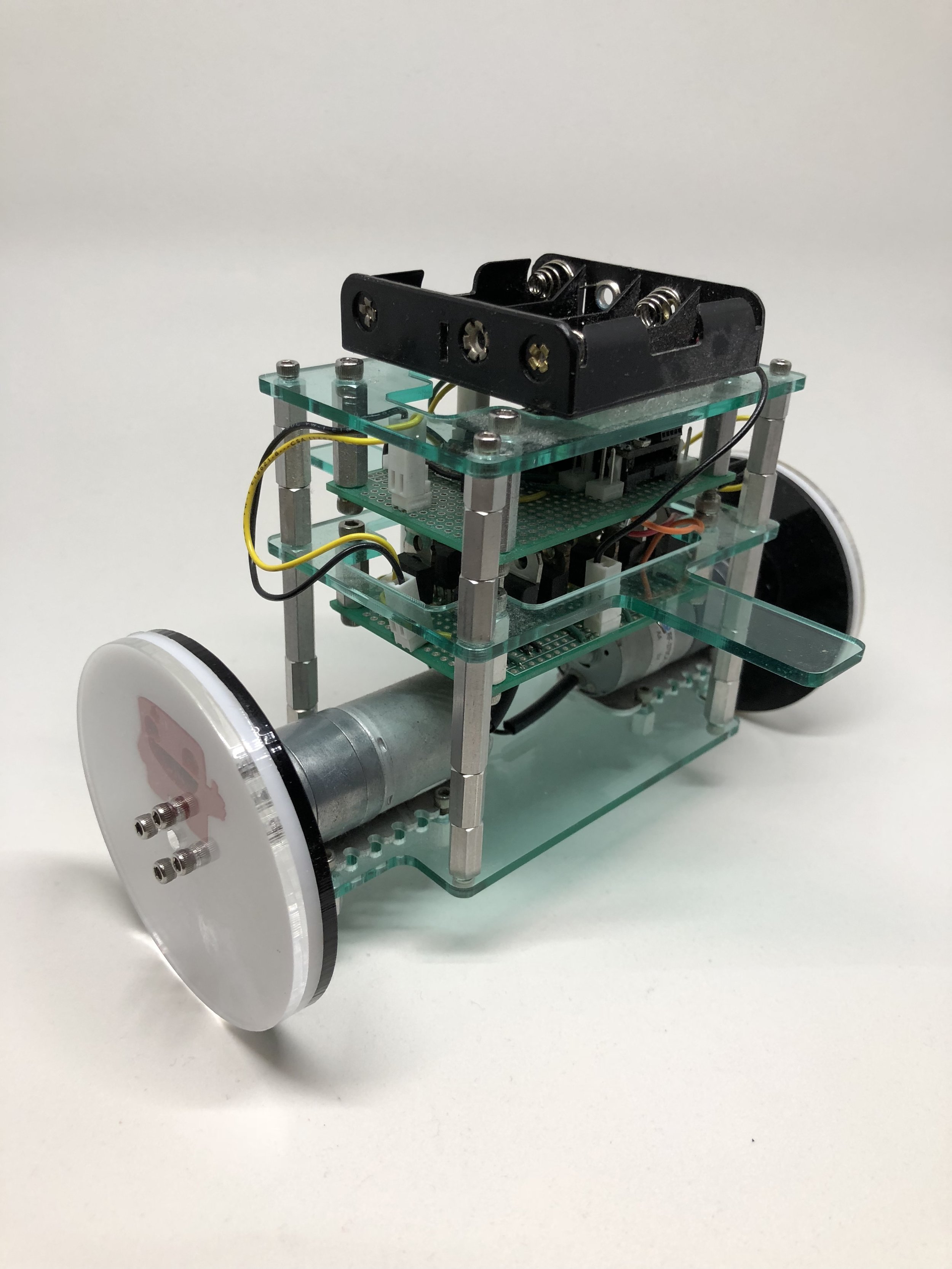
For the penultimate project in Mechatronics, we were split into teams of three and tasked with building a two-wheeled balancing robot. Each team was given an IMU, two motors, and a motor driver and instructed to utilize a PID controller. My team’s robot was designed around a character from a popular platforming game I had recently taken an interest in, Super Meat Boy. Additionally, my team chose to design our own motor driver, composed of MOSFET's, that we eventually replicated for the final project.
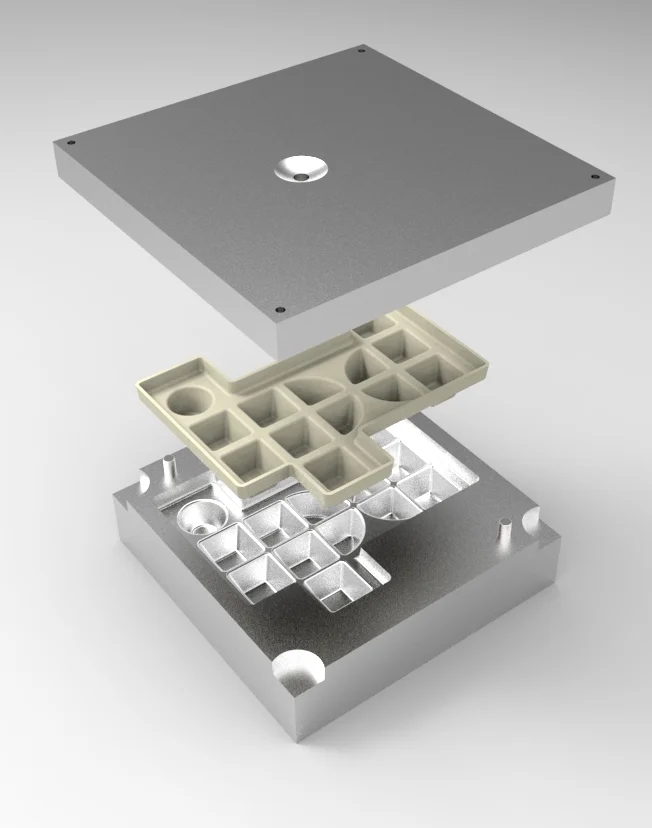
Mold was a project for IPD 501, a course in advanced modeling and manufacturing, meant to teach students the basics of modeling for injection molding. The class was split into teams of two for both parts (urethane casting and injection molding) parts of this project. For the injection molding portion of the project, we decided to create a chocolate mold. The aluminum parts were designed with draft of at least 3 degrees , checked with draft analysis, and machined using tapered end mills. Flow analysis was done to check for any trouble spots, and then the injection molder was calibrated over many shots.
Mold was a project for IPD 501, a course in advanced modeling and manufacturing, meant to teach students the basics of modeling for injection molding. The class was split into teams of two for both parts (urethane casting and injection molding) parts of this project.
For our urethane parts, we decided to create an ice mold using the Integrated Product Design at Penn logo. This design allowed us to use a one part mold, simplifying the first step of the project. We initially poured a hard urethane to test our mold, but then switched to a flexible material that took longer to cure but allowed for easy ice extraction.
Trial was the first assignment in IPD 501, a course on advanced computer-aided design and manufacturing. As the name implies, the project was meant to determine if our CAD experience indicated we were ready to take the class. We were instructed to surface model a fruit or vegetable, making sure our final model consisted of a single solid body, and submit a rendering. For my submission, I created several berries. Most of my time was spent working on the strawberry, which I found particularly interesting and challenging due to the asymmetry I forced into all of the surfaces including the basic body and the petals.
This design allowed me to practice extremely fast master modeling. The turret was created and rendered in just a few hours. The actual design is based off Torbjorn’s turret from Blizzard’s Overwatch, a game I’ve enjoyed for several years.
This design was an initial concept for a watering can. The can was completely surfaced and featured a spout that could fold in and out allowing for easy storage and a long arm to pour into plants, fulfilling two major pain points of interviewed users. Although I fully modeled the can and was ready to either 3D print or slush mold it, I decided to move forward with another concept.